NAJBLIŻSZY TERMIN SZKOLEŃ CAN BUS:
- 28.10.2025
Plan szkoleń CAN BUS – MAGNETTO Damian Lipiński Elektronika Pojazdowa
Szkolenie z magistrali CAN BUS to kompleksowy, jednodniowy kurs przeznaczony dla osób chcących zdobyć zaawansowaną wiedzę teoretyczną oraz praktyczne umiejętności w zakresie diagnozowania, analizy i pracy z magistralą CAN BUS stosowaną w branży motoryzacyjnej oraz przemysłowej. Kurs obejmuje również zagadnienia związane z protokołem J1939, protokołem komunikacyjnym UDS ISO-TP oraz symulację typowych błędów w sieci CAN BUS, co pozwala uczestnikom przygotować się do pracy w rzeczywistych warunkach.
Wieloletnie doświadczenie w branży elektroniki pojazdowej i pracach związanych z magistralą CAN BUS, pozwoliły mi przygotować kompleksowe szkolenie w tym zakresie.
Szkolenie z magistrali sieci CAN przeprowadzam za pomocą urządzenia Bench Tester, którego jestem twórcą. Bench tester pozwala nam uruchamiać i testować komponenty elektroniki pojazdowej bez konieczności posiadania pojazdu.
Po szczegółowe informacje o urządzeniu BENCH TESTER PRO zapraszam na: https://magnetto.eu/bench-tester/
I Etap Szkolenia – Diagnostyka i analiza CAN BUS
Informacje ogólne:
– Czas trwania: 1 dzień (8 godzin)
– Miejsce: Siedziba firmy MAGNETTO Damian Lipiński Elektronika Pojazdowa
– Koszt: 3075 zł brutto
– Liczba uczestników: Maksymalnie 6 osób
– Certyfikat: Każdy uczestnik otrzyma certyfikat potwierdzający ukończenie szkolenia.
WARUNEK UCZESTNICTWA – przedpłata w wysokości 50% ceny szkolenia
ZGŁOSZENIA PROSZĘ KIEROWAĆ DROGĄ MEILOWĄ na adres: szkolenia@magnetto.eu
W mailu proszę zamieścić dane kontaktowe. W informacji zwrotnej otrzymacie Państwo numer konta, na który należy wpłacić zaliczkę. Pozostała część kwoty płatna jest w dniu szkolenia. W przypadku rezygnacji uczestnika na mniej niż 7 dni przed terminem, zaliczka nie podlega zwrotowi.
W przypadku nie zapisania się 6 uczestników termin szkolenia może ulec zmianie, natomiast gdy uczestników będzie więcej zostanie ogłoszony kolejny termin w kolejnym możliwym dniu.
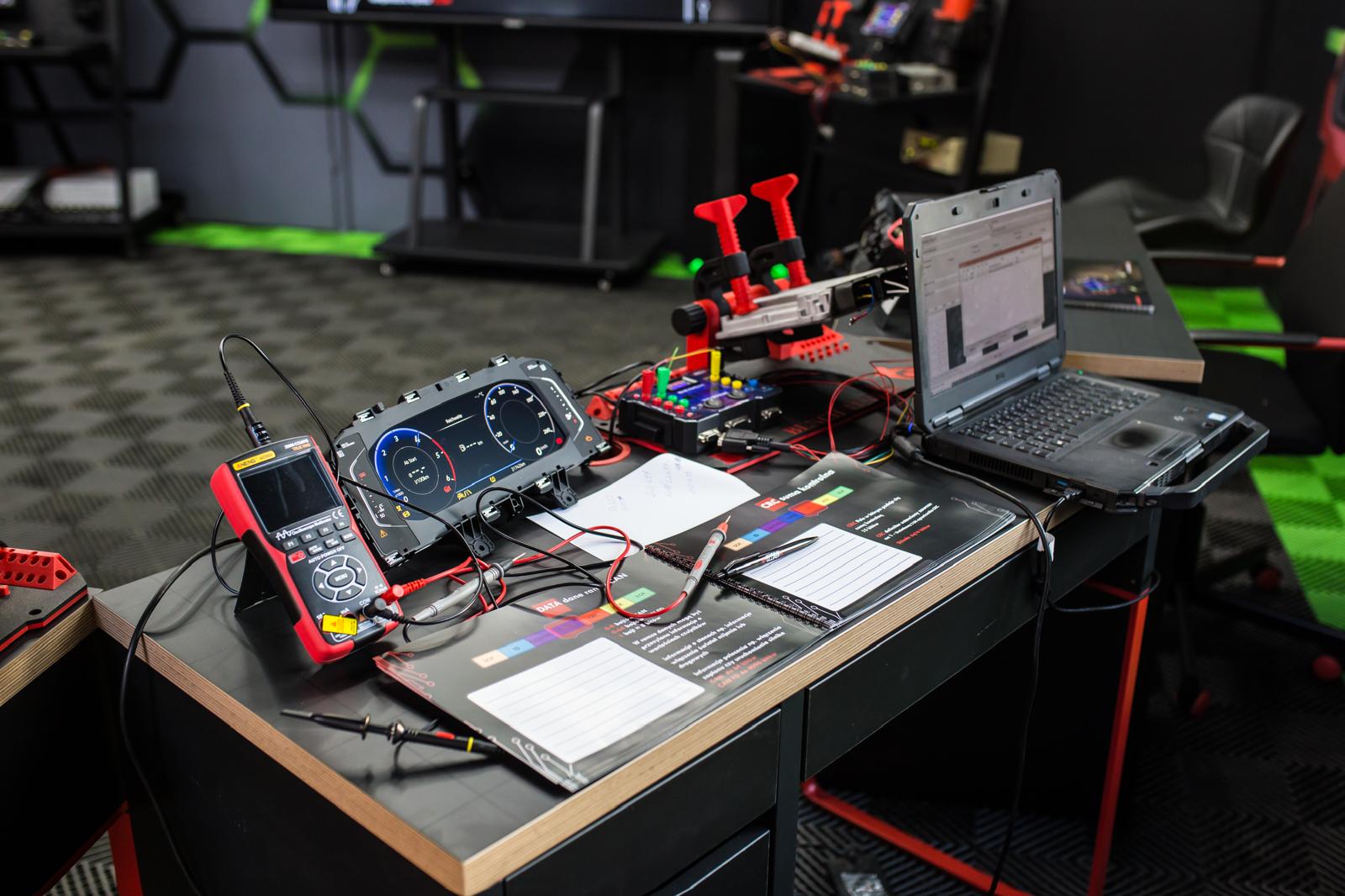
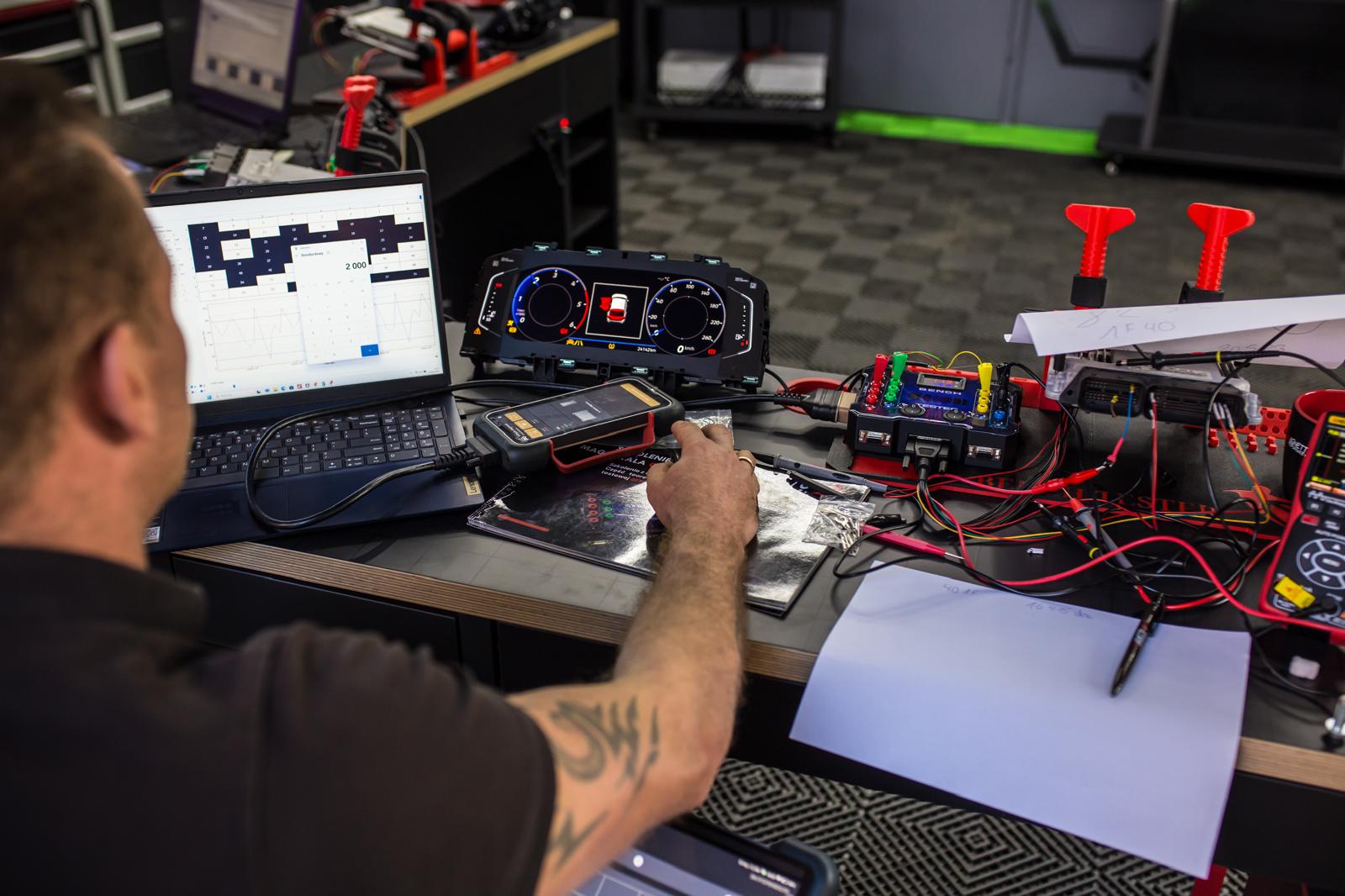
Każdy z uczestników będzie posiadał swoje stanowisko testowe z podłączonymi z sobą komponentami elektroniki pojazdowej, każde stanowisko jest wyposażone w urządzenie Bench tester pro, z oprogramowaniem CAN BUS, oscyloskop i multimetr, co pozwoli na szczegółowe przygotowanie do samodzielnych prac z magistrala CAN BUS
Na szkolenie wymagane jest zabranie z sobą komputera najlepiej z windows 10
Terminy szkoleń podajemy na bieżąco w naszych mediach społecznościowych:
Facebook:
https://facebook.com/magnettolodz
TikTok:
https://www.tiktok.com/@magnetto.eu?_t=ZN-8uWT0TAjXZ0&_r=1
Plan szkolenia
Część teoretyczna (4 godziny)
1. Podstawy magistrali CAN BUS:
– historia i zastosowanie magistrali CAN w motoryzacji i przemyśle
– zasady działania magistrali CAN
– zastosowanie magistrali CAN w pojazdach:
– komunikacja między ECU (Electronic Control Unit)
– sterowanie komponentami elektroniki pojazdowej
2. Standardy magistrali CAN:
– CAN 2.0A: Ramka z 11-bitowym identyfikatorem
– CAN 2.0B: Ramka z 29-bitowym identyfikatorem (rozszerzona)
– CAN FD (Flexible Data-Rate):
– FLEX RAY
3. Struktura ramki CAN:
– pole startu ramki (SOF) – rozpoczęcie transmisji
– identyfikator (ID CAN) – priorytet wiadomości (11 lub 29 bitów)
– pole kontroli arbitrażu – mechanizm rozstrzygania kolizji na magistrali
– pole danych – przenoszenie od 0 do 8 bajtów (dla CAN 2.0) lub do 64 bajtów (dla CAN FD)
– CRC (Cyclic Redundancy Check) – sprawdzanie poprawności danych
– ACK (Acknowledgement) – potwierdzenie odbioru ramki
– EOF (End of Frame) – zakończenie transmisji ramki
Omówienie warstwy fizycznej z wyjaśnieniem zagadnień takich jak :
– Napięcia na liniach CAN_H CAN_L
– Synchronizację bitów
– Topologia
– Bit stuffing…
Omówienie warstwy wieloetapowej :
– Mikrokontroler
– Kontroler CAN
– Transceiver CAN
4. Protokół J1939:
– zastosowanie w pojazdach ciężarowych, maszynach rolniczych i budowlanych
– struktura komunikacji:
– PGN (Parameter Group Number) – identyfikacja grupy parametrów
– SPN (Suspect Parameter Number) – identyfikacja konkretnego parametru
– Analiza ramki J1939:
– Priorytet, adres źródłowy i docelowy
5. Protokół komunikacyjny UDS/ISO-TP
– analiza i rozpoznanie warstwy transportowej protokołu diagnostycznego
5. Typowe problemy w sieci CAN BUS
– przerwy w komunikacji (np. uszkodzenie przewodów)
– problemy z napięciem na magistrali (zakłócenia, brak terminacji)
– kolizje danych i błędy arbitrażu
– błędy CRC i ACK
7. Symulacja błędów magistrali CAN BUS:
– analiza błędów transmisji:
– brak odpowiedzi od urządzenia
– nieprawidłowe dane w ramce
– rozwiązywanie problemów:
– sprawdzanie rezystorów terminujących
– lokalizacja uszkodzeń przy użyciu oscyloskopu i analizatora CAN
8. BONUS
Przedstawię kilka tajników przydatnych w naprawie i testowaniu elektroniki pojazdowej na stole (BENCH)
Część praktyczna (4 godziny):
1. Diagnozowanie magistrali CAN BUS:
– wykorzystanie oscyloskopu do analizy sygnałów CAN:
– identyfikacja przebiegów sygnałów
– analiza stanów logicznych i interpretacja danych
– obsługa analizatora magistrali CAN BUS (BENCH TESTER PRO):
– odczyt danych z magistrali
– identyfikacja problemów i usterek
2. Symulacja i analiza magistrali CAN BUS
– symulacja sygnałów na magistrali can bus
– identyfikacja ID CAN i bajtów odpowiedzialnych za konkretne funkcji
– przekazanie informacji skutecznej analizy magistrali can bus i umiejętność wykorzystania tej wiedzy w praktyce
3. Testowanie komponentów elektroniki pojazdowej:
– uruchamianie komponentów poza pojazdem:
– liczniki samochodowe
– ECU silnika …
– tworzenie odpowiednich sygnałów CAN w celu aktywacji urządzeń stosowanych w branży automotive
4. Rozwiązywanie problemów w sieci CAN BUS:
– symulacja typowych błędów:
– przerwy w komunikacji
– zakłócenia sygnału
– praktyczne ćwiczenia z naprawy usterek
5. Komunikacja diagnostyczna:
– analiza komunikacji między ECU a urządzeniem diagnostycznym
– wywoływanie odczytu informacji z ECU:
– odczyt kodów błędów (DTC)
– kasowanie kodów błędów
– wywołanie sesji diagnostycznej UDS ISO-TP
II Etap Szkolenia – Programowanie Mikrokontrolerów CAN BUS
Informacje ogólne
– czas trwania: 1 dzień (8 godzin)
– koszt: 5000 zł brutto
– miejsce: siedziba firmy MAGNETTO Damian Lipiński Elektronika Pojazdowa
Zakres szkolenia
1. Podstawy programowania mikrokontrolerów:
– języki programowania: C i C++
– środowiska programistyczne i konfiguracja projektów
2. Tworzenie urządzeń CAN BUS:
– programowanie odbioru i wysyłania danych na magistrali CAN
– tworzenie aplikacji do analizy i symulacji danych CAN
3. Praktyczne projekty:
– budowa urządzenia do monitorowania magistrali CAN
– testowanie aplikacji w rzeczywistych warunkach
– Zaprojektowanie własnego urządzenia w programie KiCad
– przygotowanie projektu PCB do produkcji
Podsumowanie korzyści:
Po ukończeniu I etapu szkolenia uczestnicy będą:
– posiadać pełną wiedzę teoretyczną o magistrali CAN BUS
– rozumieć strukturę i działanie ramki CAN oraz protokołów komunikacyjnych
– potrafić diagnozować i naprawiać usterki magistrali CAN w pojazdach
– umieć obsługiwać oscyloskop i analizator CAN BUS
– samodzielnie testować i uruchamiać komponenty elektroniczne poza pojazdem
– gotowi do nauki programowania mikrokontrolerów w II etapie szkoleni